- 上一篇:北斗2惯性组合导航信息融合算法设计
- 下一篇:MLD模型三容水箱混杂系统仿真研究
1.3 研究内容和主要工作
本论文的内容安排如下:
第一, 介绍研究内容的目的背景及意义和相关技术的国内外发展现况和趋势、以及研究内容。
第二,介绍了卫星导航的基本理论及基本工作原理。
第三,研究了GPS接收机信号捕获基本原理和算法。
第四,学习在CCS环境下编写程序。
第五,搭建仿真平台,分析仿真结果。对所设计的GPS接收机信号捕获算法进行仿真,分析仿真结果,证明所设计的GPS接收机信号捕获算法,基本达到设计要求。
第六,对全文进行了总结,并对未来的工作进行了展望。
2 卫星导航基本理论及工作原理
2.1 GPS全球定位系统的组成
GPS全球定位系统由空间卫星部分、地面控制部分以及用户部分组成,GPS导航系统结构如图2.1所示。
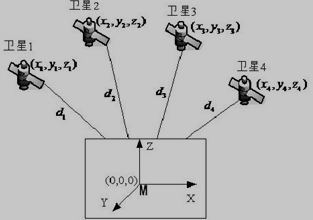
图2.1 GPS全球定位系统组成
(1) 空间部分。由分布在倾角为 的近圆轨道上的21颗导航卫星和3颗备份卫星组成,卫星运行高度为20230km,运行周期718分钟。GPS导航卫星运行机制保证地球上所有地区,在任何时刻可以同时观测到4颗以上的导航卫星。空间部分任务是发送导航电文,导航电文数据包括卫星星历、时钟偏差校正参数、信号传播延迟参数、时间同歩信息、卫星运行状态以及所有卫星的概略星历,接收机通过解码导航电文得到上述参数,用于导航定位解算。
(2) 地面控制部分。由分布于地球上不同地区的主控站、信息注入站和监测站组成。主控站收集和处理本站和各监测站的测量数据并计算卫星时钟和轨道参数,将预测钟差、卫星星历等参数编辑成导航电文并发送到三个注入站。注入站受主控站控制,主要任务是接收主控站数据,并将接收到的导航电文等数据注入到卫星存储系统中,提高卫星发送信号的精度。监测站也受主控站控制,任务是对卫星进行连续的跟踪测量,进行伪距测量,并利用气象数据和电离层数据,每隔一段时间进行一次数据平滑处理,然后传送给主控站,用以确定卫星的精密轨道。
(3) 用户部分。主要是GPS接收机,主要功能是通过接收卫星信号,测量出天线位置至卫星位置的伪距离以及距离的变化率,进行卫星轨道参数等数据的解调,接收机利用解调出的数据进行数据解算,从而得到用户当前时刻的位置、速度、时间等信息。源.自/751·论\文'网·www.751com.cn/
2.2 GPS定位原理
GPS卫星位置计算坐标系采用大地坐标系WGS-84,该坐标系原点为地球质心M,Z轴指向协议地球极(CTP),X轴指向零子午面与CTP相应的赤道交点,Y轴与平面XMZ垂直,并且构成右手坐标系,它用三个参数标定定位点位置,该定位点位置为定位点在椭球坐标系上的经度、纬度和高度。
GPS的基本定位原理如下,GPS卫星的位置数据作为已知参数向用户发送,以高速运动的卫星瞬间位置作为已知的起算数据,卫星连续发送自己的时间信息和星历数据,用户采用空间距离后方交会的方法处理接收到的信息,继而解算出接收机所在位置、速度以及时间信息。定位点未知数为该定位点在地心坐标系下的坐标值以及接收机的时钟差,因此GPS需要至少4颗卫星数据来进行定位计算,GPS定位原理如图2.2所示。
图2.2 GPS卫星定位原理
(2.1)
式中待测点坐标 、 、 和 为未知数;c为GPS信号的传播速度; 是卫星 与定位点之间的距离,通过卫星信号传播时间乘以速度得到,即 ; 是卫星 的时钟差,解式(2.1)即可得到定位点在地心坐标系下的坐标值,继而得到用户定位信息。