- 上一篇:AT89C51单片机的存包柜控制系统设计+电路图+程序
- 下一篇:基于LabVIEW的数据采集系统设计
立体车库结构特点是:底层只能平移,顶层只能升降。除顶层外,底层都必须预留一 个空车位,供进出车升降之用。当底层车位进出车时,无需移动其他托盘就可直接进出车; 顶层进出车时,先要判断其对应的下方位置是否为空,不为空时要进行相应的平移处理,直 到下方为空才可进行下降动作,进出车完成后再上升回到原位置。其运动的总原则是:升 降复位,平移不复位。
2 系统控制方案的总体设计
2.1 自动化立体车库的描述
目前,立体车库主要有以下几种形式:升降横移式、巷道堆垛式、垂直提升式、垂 直循环式、箱型水平循环式、圆形水平循环式等。在对国内外各种同类产品进行分析的 基础上,再结合造价、技术难度以及用户需求等各个方面的因素,可以发现升降横移式 立体车库形式比较多,规模可大可小,而且对场地的适应性较强,同时采用这类设备的 车库十分普遍。因此,最终确定研究对象为升降横移式立体车库。
2.2 系统设计的基本步骤
立体车库系统设计与调试的主要步骤,如图 2.1 所示
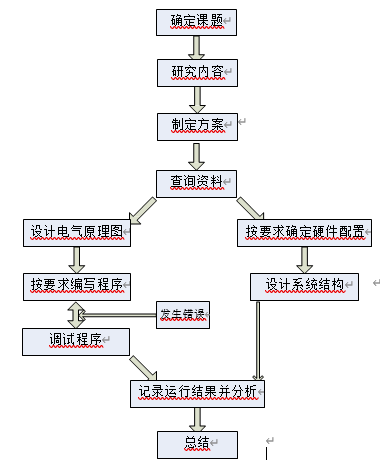
图 2.1 立体车库系统设计与调试的主要步骤图
3 立体车库系统硬件方面的设计
3.1 硬件系统总体设计
3.1.1 硬件系统结构设计
立体仓库存储系统主要由 PLC 控制模块、步进驱动模块、丝杆驱动模块、工件推出 模块、立体仓库、气源处理组件等部件组成。
3.1.2 精确定位原理
PLC 每发出一个脉冲,步进电机转动一个步距角度,X 轴步进电机带动 X 轴丝杆做左 右直线运动或 Z 轴步进电机带动 Z 轴丝杆做上下直线运动,实现载物台的上、下、左、 右运动。通过控制 X 轴、Z 轴步进电机的脉冲个数,就可以控制载物台在 X 轴、Z 轴上移 动的距离,实现载物台在 X—Z 轴平面的精确定位,从而把物体放到仓库的指定位置。平 移距离=步距角×脉冲个数×螺距/360)。来.自/751·论\文'网·www.751com.cn/
3.2 升降横移式立体车库的基本结构
升降横移式立体车库由底盘、三层十二车位停车场、运动机械及电气控制等四部分 组成。机械部分采用滚珠丝杠、滑杠、普通丝杠等机械元件组成,采用步进电机、直流 电机作为拖动元件。电气控制是由西门子 S7-200 系列可编程序控制器(PLC)、步进电机 驱动电源模块、开关电源、位置传感器等器件组成。本系统采用滚珠丝杠、滑杠和普通 丝杠作为主要传动机构,电机采用步进电机和直流电机,其关键部分是堆垛机,它由水 平移动、垂直移动及伸叉机构三部分组成,其水平和垂直移动分别用两台步进电机驱动 滚珠丝杠来完成,伸叉机构由一台直流电机来控制。它分为上下两层,上层为货台,可 前后伸缩,低层装有丝杠等传动机构。当堆垛机平台移动到货架的指定位置时,伸叉电 机驱动货台向前伸出可将货物取出或送入,当取到货物或货已送入,则铲叉向后缩回。 整个系统需要三维的位置控制。