- 上一篇:机动车雷达测速仪现场检测系统设计
- 下一篇:MatLAB语音采集和分析的程序设计
摘要:在该设计中,利用STM32处理器作为主控制器,由CMOS摄像头传感器来实现对路线的识别,通过程序对小车的控制,使小车能按照固定的黑线平稳而快速地循迹行驶。本设计的特点就是提升智能小车对路径识别性能和抗干扰能力,很好的体现了智能化控制在小车的应用,并且改善了智能小车依赖光电传感器来识别路面的局面,能快速的调节小车的姿态,具有较好的动态及时性和良好的稳定性。42251
毕业论文关键词:STM32;摄像头;循迹;智能化;稳定
STM32 Intelligent Video Tracking Car Design
Abstract: In the design, the use of STM32 processor as the main controller, by CMOS camera sensor to realize the recognition of route, through the procedures for the control of the car, the car can according to the fixed black line smooth and fast tracking. The design features of the smart car path recognition performance and anti-interference ability, good embodies the application of intelligent control in the small car, and improve the intelligent car depend on the photoelectric sensor to identify the situation of the road, can quickly adjust the posture of the car, has a good dynamic performance and good stability.
Key Words: STM32; Camera; Tracking; Intelligent; State
引言
如今,随着智能小车技术渐渐提高和发展,人们也渐渐关注车辆的智能性和安全性。目前,高速公路的水平正在不断提高,道路条件愈来愈复杂,特别是高速公路的快速发展,人们对汽车的速度和安全性要求愈来愈高;与此同时,人们的生活水平不断提高,社会上的车辆也愈来愈多,道路上的车流量也愈来愈大,汽车彼此碰撞的可能性也愈来愈大,但是这些情况,在智能车出现了之后,在很多情况下避免了因人驾驶疏忽而导致交通事故的可能,也使得交通更加畅通,从而车辆在行驶过程中的安全性和可靠性就能得到提高了,因此发展智能小车是很有必要的。
世界上已经有越来越多的研究机构开始研究智能化交通,而且已经研制出了许多智能化的原型车辆,经过相应的测试,这些原型车辆虽然不能达到完全智能化,但已经推动了汽车的智能化研究。在这些原型车辆的研究中,结合了一些交叉学科的知识,比如信号处理技术、自动控制原理和人工智能等方面,并且在其中发现了很多研究方法和新的观点。从目前的发展来看,汽车上的电子技术势必渐渐满足人们对智能化的要求[1]。
现在有很多企业已经正在应用智能化控制技术,从这方面的趋势来看,往后智能控制的方向就是智能化和人性化。在芯片性能方面,国内的开发和研究还是有所欠缺的,比如在芯片的稳定性方面大多还是被外国所垄断,这些都是我国目前要发展的重点。
1.智能小车系统总体介绍
1.1 小车整体设计概述
本文中的智能小车,能够实现通过摄像头传感器独立自主的在一段跑道上循线行驶,其跑道的底层为白纸,中心有20mm宽度的连续黑线为标志引导汽车行驶。本论文的小车是一个自动控制系统。图1为整体系统模型框图。
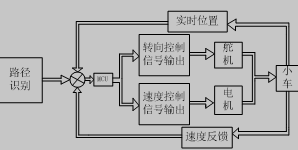
图1 整体系统模型框图
本视频循迹小车是通过CMOS摄像头传感器来识别道路,将收集的视频信号经过二值化后送到处理器处理,小车根据路面信息判断行驶方向;并且用PID算法控制小车速度。此外,在软件方面,本课题采用了实时采集方式来对小车的速度进行控制,最终对小车进行实时路况信息的实时分析,实时控制。
1.2 CMOS图像传感器的特性
(1)光照特性
-
基于嵌入式技术的智能家...
-
STC89C52RC单片机的智能路灯...
-
MSP430无线传感器网络的家...
-
MSP430物联网的智能农业数...
-
STM32航模体感遥控器的设计+电路图
-
LabVIEW视频运动目标检测与跟踪方法研究
-
STM32单片机的蓝牙音响设计+电路图
十二层带中心支撑钢结构...
java+mysql车辆管理系统的设计+源代码
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
大众媒体对公共政策制定的影响
杂拟谷盗体内共生菌沃尔...
电站锅炉暖风器设计任务书
中考体育项目与体育教学合理结合的研究
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...