- 上一篇:PLC压榨式脱水机液压控制系统设计+梯形图
- 下一篇:锚链五环长测量平台测控系统设计与开发
第二章 控制系统总体方案设计
2.1控制系统总体方案的选择
选取合适的控制方案,对图书自动存取机器人是非常关键的,为了保证本装置能够按照要求完成基本的导航,识别,存取等操作,需要从移动平台,机械手,机械手末端执行器三个方面综合考虑该系统的整体控制方案。
在目前的移动服务机器人领域中,常采用的是单片机控制、PLC控制、运动控制卡控制等控制方案。微控制器(MCU,即单片机)将CPU、RAM、ROM或EPROM、I/O等集成在一块芯片上,具有集成度高、速度快、功耗低、抗干扰能力强、重量轻、体积小、功能强、价格低等诸多优点,但是,大多数单片机的运算速度还是不够快,在需要进大运算量处理的运动控制当中也往往力有不怠;PLC,即可编程序控制器,其特点是在出厂前厂家已将控制命令植入其中,使用时只需用户根据工作情况编好程序即可使用,并且价格相对较低,环境适应能力强,工作稳定,是工业控制控制系统中常常采用的方案,但PLC是以循环扫描方式工作,由于受到PLC工作方式的限制以及扫描周期的影响,被控制电机不能在高频下工作,转速较慢,且不能实现复杂的运动关系,故一般只应用在点位控制和单轴运动控制等场合;而运动控制卡则偏向于精确运动方面的控制,经常使用的工控机(IPC)+工业控制卡+电机驱动器+伺服电机[10]的控制方案显示出了其在运动控制方面的优势,运动控制卡在使用时常常和工业控制计算机(IPC)共同使用,其主要负责运动控制的大部分细节,而工业控制计算机则负责人机界面的管理和系统的实时监护,这样既可充分利用计算机的硬件资源,又可丰富控制卡的功能。另外,近年来,工控机的价格逐渐下降,而各类软件层出不穷,使此种控制方案逐渐取代了PLC。运动控制卡还配有开放的函数库供用户在DOS或Windows系统平台下自行开发、构造所需的控制系统。
综上所述,本设计采取运动控制卡和工控机组合控制的方式,在windows7系统下,使用C++进行软件编程。
2.2 控制系统硬件的连接
控制系统的硬件系统除了工控机和运动控制卡外,还包括传感器,电机,电机驱动器,摄像头,电源等部分,机器人车体及导引方式可选择在AGV小车基础之上进行修改。
运动控制卡现选择由深圳固高科技公司生产的GE系列多轴点位运动控制器,该系列产品基于计算机PCI总线,可同时控制1-8个伺服/步进电机。具体型号为GE-800-PV,可控制轴数选择8,由于该系统中电机数目为5,因此实际轴数为5,多余控制引脚闲置。控制方式包括开环或闭环,输出方式为模拟量或16路数字量输出,每轴输出差分脉冲,最高频率为1MHZ,模拟量输出范围-10V~+10V。输入时可提供16路数字通用数字输入和8路模拟量输入,并提供8轴编码器反馈输入,对本设计而言,电机,继电器,占据8位数字量输出,各类传感器模拟输入不超过8路,因此该运动控制器可完全满足。
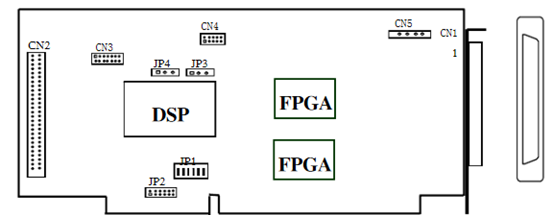
图2-1 GE-800-PV运动控制卡外形图
如图2-1所示为GE-800-PV型号运动控制卡外形图,该控制卡提供两个控制接口CN1和CN2口,其中CN1为驱动控制接口,主要用于和电机驱动器进行连接,实现对电机的控制;CN2口为输入输出接口,该接口用于限位开关,home信号输入,驱动使能,通用数字量输入输出等功能。在本控制系统中,接口功能如表2-1。
如图2-2为硬件系统连接示意图。移动平台动力系统选取直流伺服电机,通过驱动器驱动电机,输出时连接光电编码器,将反馈信号反馈于电机驱动器和运动控制卡,从而进行距离测算;机械手使用由继电器控制的三个气缸,分别达到伸缩,开合和旋转三种操作任务,以上均使用运动控制卡进行总体控制。除此之外,机械臂的三轴运动时,为防止运动超出行程而出现错误,运动控制卡还需接收由机械臂三个限位传感器所传来的正负限位信号。
-
螺母内螺旋滚道非接触式自动检测技术研究
-
MSP430单片机自动搬运控制...
-
ARM自动售票机城市轨道交通中的AFC系统设计
-
STC89C53单片机银行自动取款机系统设计
-
PLC自动掰片系统的设计与应用
-
STC89C51单片机的自动窗帘控...
-
PLC自动化立体停车库自动...
中考体育项目与体育教学合理结合的研究
乳业同业并购式全产业链...
电站锅炉暖风器设计任务书
java+mysql车辆管理系统的设计+源代码
河岸冲刷和泥沙淤积的监测国内外研究现状
十二层带中心支撑钢结构...
杂拟谷盗体内共生菌沃尔...
大众媒体对公共政策制定的影响
当代大学生慈善意识研究+文献综述
酸性水汽提装置总汽提塔设计+CAD图纸