- 上一篇:基于组态软件的液位控制系统设计
- 下一篇:AT89C51单片机自动窗帘控制系统设计+源代码+PCB电路图
机械手有多种种类,按照驱动方式分有机械式、气动式、电动式、液压式机械手;按照应用范围型分有专用型和通用型机械手;按照运动轨迹控制方式分有连续轨迹控制和点位控制机械手等。
本课题以西门子公司的S7-200系列PLC作为搬控制。
1.2 搬运机械手的应用简况
在工业现代化中,机械化、自动化已成为生产过程主题。在机械工业中,装配、加工等生产过程是不连续的。大批量自动化生产的有效办法只能依靠专用机床、程控机床、数控机床、加工中心等自动化机械。
除切削加工外,还有大量的装配、搬运、装卸等作业,可以进一步实现机械化。据资料显示,美国生产工业零件中,有75%是小批量生产。搬运机械手就是为实现这些工序的自动化。机械手可在空间自由抓取物体,动作灵活多变,适用于中、小批量自动化生产,能够广泛应用于柔性自动生产线。
国内外工业现代化生产中搬运机械手主要应用以下几个领域:
(1)热加工方面
在危险、高温的笨重体力劳动中,热加工要求实现自动化[2]。为能提高工作效率,和保障工人的自身安全,机械手能从事于低速、少量、大件和人力所不能胜任的工作。
(2)冷加工方面
在冷加工方面,机械手广泛应用于轴类、盘类、柴油机配件以及箱体类等等零件加工时的上下料和刀具安装。能在数字控制、程序控制等机床上应用。同时可以在加工生产线和自动化生产线上应用,是机床和设备上下工序联接的重要手段。
(3)拆修装方面
拆修装是铁道部门繁重体力劳动较多的工作之一,有利于机械手的应用。在机务段、铁路工厂等部门,都采用机械手清除石棉、拆装三通阀、分解制动缸、装卸轴箱、钩舌、组装轮对等,降低劳动强度,提高拆修装工作效率。近期还研制了一种客车专用车内喷漆机械手,能对客车内部进行连续喷漆作业,改善了劳动强度,提高了喷漆工艺的质量和效率[3]。
随着传感器应用技术、电子技术、和计算机控制技术的高速发展,在机械手应用领域更加广泛,机械手能在工业生产中取代工人劳动并提高工作效率。
1.3 机械手的应用意义
在工业生产活动中,机械手的实际应用意义可概括如下:
(1)可以提高工业自动化程度
机械手,能提高材料传送、工件装卸、刀具更换等等以及机器的装配等,可以提高劳动效率,降低企业生产成本,能快速实现工业自动化。
(2)可以改善劳动条件
在有毒、放射性、噪音、臭、高温、高压、低温、低压、粉尘的工业现场,机械手可以部分或者全部取代工人进行生产作业,改善了工人的工作环境和工作强度,保证了工人的人身安全[4]。
(3)可以减少人力
在工业生产活动中,有许多重复、时续、有规律的生产,机械手可以代替工人工作,减少人力物力,在综合自动化加工生产线和自动化加工车床,机械手都完全可以取代工人,能够准确地控制生产,大大提高了企业的人力资源成本。
2 系统设计
2.1 系统结构及流程
本毕业设计主要研究的对象是,将一个发动机曲轴从一个自动化生产线移动到另一个自动化生产线上进行加工。机械系统整体布局如图2-1:
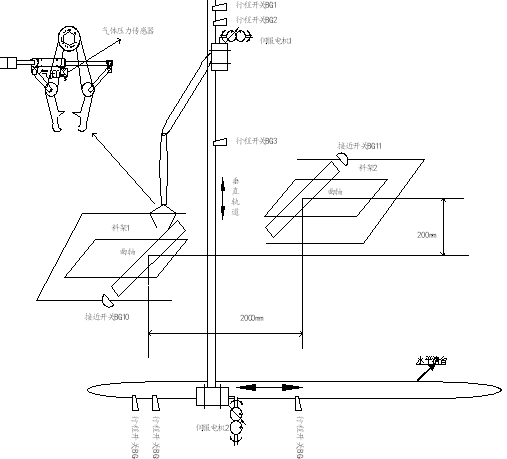
图2-1 机械系统整体布局示意图
搬运机械手主要有控制箱、机座、滑动部、升降部、腕部和手部以及其他附件构成。PLC和控制器安装在控制箱内部,其主要由信号线和电缆与搬运机械手连接;滑动部以导轨为导向装置,其运动由伺服电机驱动;升降部以导轨为导向装置,升降运动由伺服电机驱动丝杠完成;手部是四指结构,具有自锁功能,由夹紧气缸完成。由数字脉冲信号来控制定位机械手,进行升降滑动速度调整,同时位置调整也由脉冲数来控制,用脉冲频率来调整速度。在进行有无工件检测时,通过在料架1和料架2上都安装接近开关测定,架料1有工件时机械手下降并抓取,机械手在料架2检测到无工件时,才下降放下工件。搬运机械手必须满足断电断气时保持当前状态,具有自锁功能。